Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Проектирование JK-, T- триггеров и 4-х разрядного счётчика
q0<='0';<='0';<='0';<='0';
end if;PROCESS;<= qs0;<= qs1;<= qs2;<= qs3; a;
Последнее обнуление необходимо, чтобы после 15, счётчик не перевёл все выходы в постоянный сигнал - 1, а начал считать снова. Смоделируем работу и составим временную диаграмму:
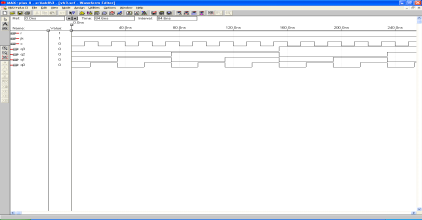
Результат ничем не отличается от результата графической схемы.
Самое читаемое:
Автоматическая измерительная система в виде электронного термометра
Электронные
термометры представляют собой автоматические устройства.
В
общем случае, автоматическими устройствами называются такие устройства, которые
позволяют осуществлять операции измерения каких-либо величин или управления
какими-либо объектами без непосредственного участия человека.
Автоматическое
устройство, как пра ...
www.techstages.ru : Все права защищены! 2026