Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Локальные системы автоматики
1). Закон регулирования - ПИД; критерий качества регулирования 20%
перерегулирования (![]() =20%).
=20%).
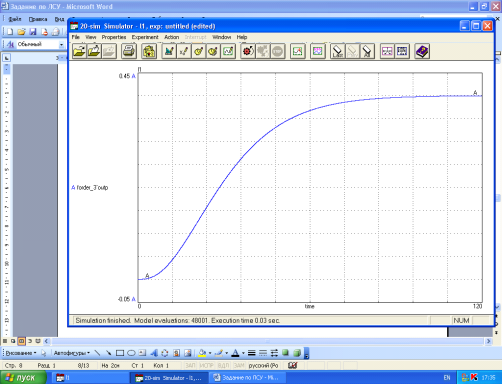
Рис. 1. Кривая разгона.
Аппроксимация кривой разгона апериодическим звеном первого порядка с
запаздыванием. Определение соотношения наклона угла ![]() (0.1 - 0.2).
(0.1 - 0.2).
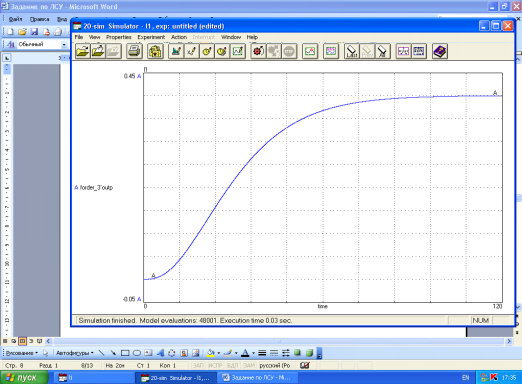
Рис. 2.
Рассмотрим кривую разгона (рис. 1) с самовыравниванием. Ей соответствует передаточная функция вида:
![]() ,
,
где ![]() (коэффициент усиления объекта).
(коэффициент усиления объекта).
![]() , τ=7,2 с, Т=42 с,
, τ=7,2 с, Т=42 с, ![]() .
.
аппроксимация интегральный регулятор апериодический
3). Оптимальные настройки регулятора по методу Копеловича.
Чтобы найти динамические настройки ПИД-регулятора для апериодического
критерия с минимумом ![]() , можно воспользоваться приближенными формулами А. П. Копеловича:
, можно воспользоваться приближенными формулами А. П. Копеловича:
![]()
- Нахождение передаточной функции замкнутой системы.
- Нахождение методом трапеций переходного процесса регулятором.
- Моделирование АСР с использованием программы 20-sim.
- Сравнительный анализ полученной системы.
Самое читаемое:
Оснащение участка железной дороги аппаратурой многоканальной связи с использованием волоконно-оптического кабеля
В настоящее время связь проникла во все сферы человеческой деятельности и
является одним из наиболее быстро развивающихся элементов инфраструктуры
общества.
Телекоммуникационные технологии очень широко применяются на
железнодорожном транспорте. Для повышения эффективности и качества работы
железнодорожного транспорта необходима с ...