Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Использование микроконтроллера в системах управления
В современных системах управления микропроцессорная техника все чаще и чаще находит себе место. Это объясняется простотой ее внедрения, использования и модификации. Микроконтроллеры представляют собой приборы, конструктивно выполненные в виде одной БИС и включающие в себя все устройства необходимые для реализации цифровой системы управления минимальной конфигурации: процессор, запоминающее устройство команд, внутренний генератор тактовых импульсов, а также программируемые интегральные схемы для связи с внешней средой. Наличие ППЗУ в составе микроконтроллеров позволяет без труда осуществлять изменение кода программ и данных, в случае модификации системы управления или изменения алгоритмом управления. Применение микроконтроллеров позволяет реализовать очень гибкие алгоритмы управления, в том числе и нелинейные. Использование микроконтроллера в системах управления обеспечивает достижение высоких показателей эффективности при столь низких затратах. Присутствие в микроконтроллерах многочисленных линий ввода/вывода делает возможным включения микроконтроллера в систему управления без дополнительных аппаратных затрат. Функциональная законченность, достаточно широкие возможности расширения микроконтроллерной системы, а главное высокая мобильность и адаптация к конкретной технической система за счет разработки соответствующего программного обеспечения, обеспечивают перспективность использования микроконтроллеров в системах автоматического управления.
Разработать двухканальную микроконтроллерную систему и соответствующее программное обеспечение, которая обеспечивала бы реализацию комплексно-оптимального закона управления:
 (1)
(1)
где
![]() (2)
(2)
x1(t) - напряжение сигнала аналогового датчика
x2(t)-напряжение сигнала сенсорного датчика
|
Вар № |
С1 |
С2 |
Umax |
γ0 |
γ1 |
γ2 |
γ3 |
r0 |
r1 |
r2 |
|
(В) |
(В) |
(В) |
(В) |
- |
- |
- |
- |
- |
- |
|
|
8 |
0.67 |
0.84 |
3.5 |
0.03 |
0.06 |
0.17 |
0.19 |
0.12 |
0.74 |
1.6 |
Дифференциальное напряжение сенсорного элемента (измерительный мост) изменяется в пределах от 0.5мВ до 250мВ,а синфазное Uc не превышает 2.5 В. Погрешность реализации линейного закона управления d1=d2=2.5%
Климатические условия работы: -100С - +400С, Dt=25°С. Закон изменения выходной функции можно представить следующим образом:
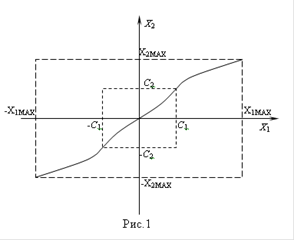
Внутренний прямоугольник ограничивает область линейного закона изменения сигнала (U2(t)). Внешний - область изменения сигналов x1(t), x2(t). Область между внешним и внутренними прямоугольниками описывает нелинейный закон изменения сигнала (U1(t)).
В данной системе линейный закон U2(t) будет реализован аналоговым способом. Нелинейный закон будет реализовываться в микроконтроллере программным путем.
- Структурная схема оптимальных по быстродействию регуляторов
- Описание выбора и расчета схемы первого канала измерения.
- Инструментальный усилитель
- Описание выбора и расчета схемы второго канала измерения
- Выходная цепь
- Выбор элементов
- Микроконтроллер
- Аналоговые ключи
Самое читаемое:
Динамическое торможение электропривода
Динамическое
торможение электропривода, режим работы электропривода, при котором в
результате взаимодействия постоянного магнитного потока в электродвигателе с
током замкнутого электропроводящего контура создаётся тормозное усилие. В
электроприводе с электродвигателем постоянного тока Д. т. осуществляется замыканием
обмотки якоря н ...