Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Непрерывный и квантованный объекты управления в пространстве состояний
1. Задана линейная стационарная дискретная система (параметры непрерывных динамических звеньев в таблице 1 Приложения 2).
![]()
![]() и
и ![]() .
.
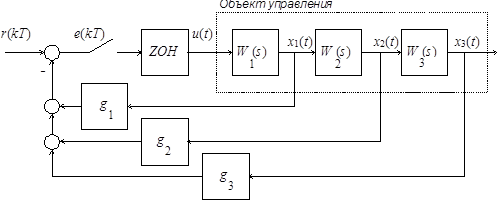
Рисунок 1. Структурная схема линейной стационарной дискретной системы
. Составить описание непрерывного объекта управления в пространстве состояний.
. Выбрать период дискретности и обосновать его выбор.
. Получить описание квантованного объекта управления в пространстве состояний.
. Определить параметры матрицы обратной связи G
, располагающей
собственные значения замкнутой системы точках ![]() =0.9,
=0.9, ![]() =
=![]() ,
, ![]() =
=![]() (таблица 2 Приложения 2). Для расчета коэффициентов
обратной связи использовать метод канонической формы фазовой переменной. Для
синтезированной системы построить ее корни на комплексной z-плоскости и график
переходного процесса при единичном ступенчатом воздействии.
(таблица 2 Приложения 2). Для расчета коэффициентов
обратной связи использовать метод канонической формы фазовой переменной. Для
синтезированной системы построить ее корни на комплексной z-плоскости и график
переходного процесса при единичном ступенчатом воздействии.
. При выбранных параметрах матрицы обратной связи G
определить установившуюся ошибку при подаче на вход системы сигнала 1,32*1(t) (таблице 3 Приложения 2).
. Получить дискретную передаточную функцию замкнутой системы управления по каналу, r(z) -> x3(z) (таблице 4 Приложения 2). По полученной передаточной функции составить разностное уравнение.
. Составить блок-схему алгоритма или написать программу на любом языке программирования высокого уровня, реализующую дискретную передаточную функцию замкнутой системы управления на основе полученного разностного уравнения (по п.1.7).
- Векторно-матричное описание исходной системы
- Определение периода квантования
- Векторно-матричное описание квантованного объекта
- Синтез цифровой системы управления методом канонической фазовой переменной
- Проверка синтезированной системы
- Расчёт установившейся ошибки
- Расчет дискретной передаточной функции по каналу «r(z) - x3(z)» и получение разностного уравнения
Самое читаемое:
Информационно-вычислительная сеть на основе архитектуры клиент-сервер, предметная область Магазин бытовой техники
Компьютерная сеть обозначает
наборы связанных между собой автономных компьютеров. Два компьютера называются
связанными между собой, если они могут обмениваться информацией. Связь не
обязательно должна осуществляться при помощи медного провода. Могут
использоваться самые разнообразные средства связи, включая волоконную оптику,
...